以下是引用JimmyQ在2015-7-29 上午7:18的发言
主题:这是个蛮好的资料,但仅有FW和线路图是远远不够制作这个的,你要是把你的这些资料的出处也提供出来,那该是多么美好的事情,现在这点资料,国内应该无人会根据这个来制作,那你贴出来又有什么意思?我根据你的文件里面可以 查找的关键词比如:sevenfly, crazy file 等,无法找到出处,能不能请你帮我一下?我对这个很有兴趣,谢谢! 补充了出处,希望对你有所帮助 组装
从左到有依次为:正反浆,电机,主控板,双面胶,无线收发模块,天线,电机座和电池。
把电机引线拧成麻花状(别太使劲拧断了),防止飞线乱飞,引线穿过电机座。
把电机座装在主控板上,注意正反,第一次有点紧,嗯……咳……使劲,嗯……插到底。
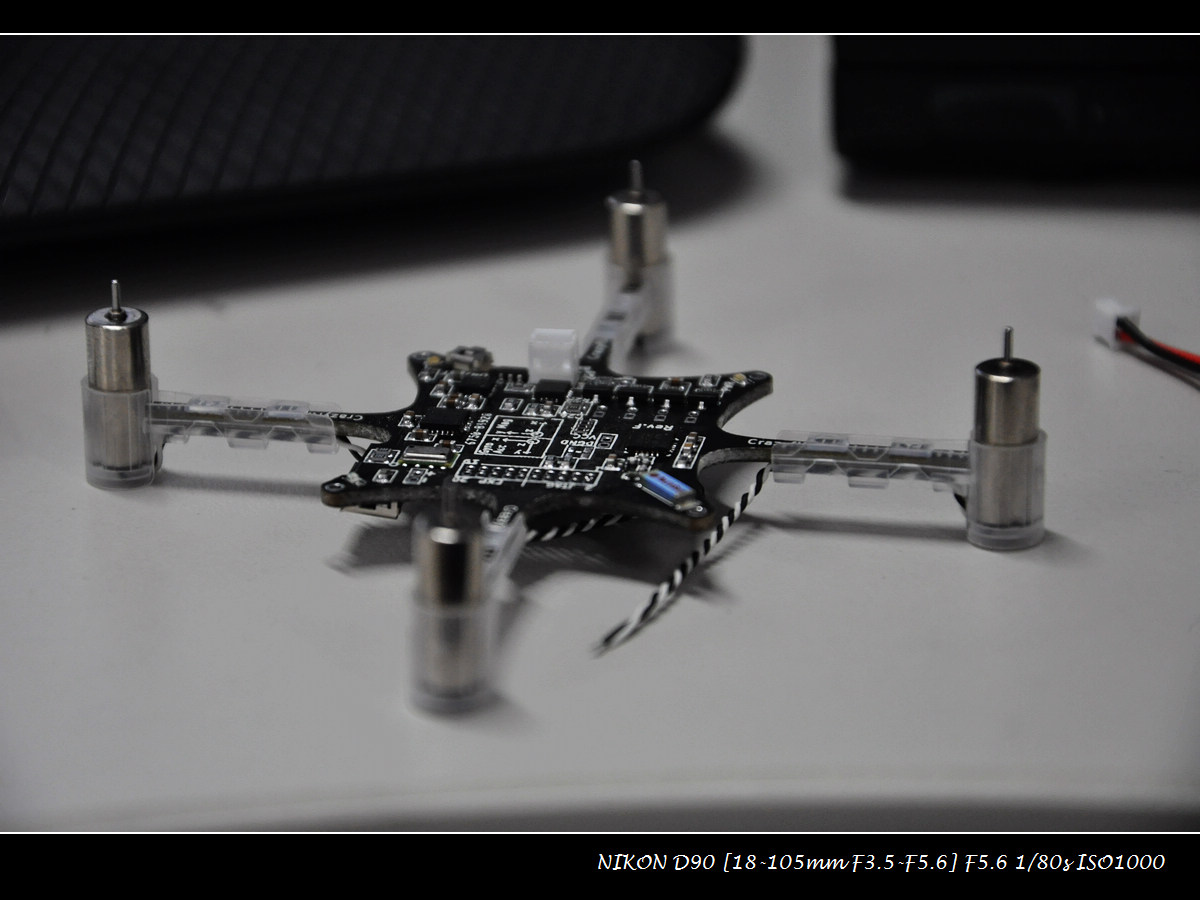
四个电机安装完如图所示
按如图所示焊接电机引脚,注意最上面是标有M1标志的电机。
其它的引脚依次左右交换焊接。
螺旋桨分正浆和反浆,凸面朝上安装。
对角为相同的螺旋桨,相邻为不同螺旋桨,带字母A的浆装M2和M4上。
剪一小块合适大小的双面胶把电池贴在主控板合适的位置上。
接上电源。
接上crazyradio,打开crazyflie的客户端。
搜索无线信号,crazyflie的信号都是以radio开头,后面的频道/速率可以修改,防止2.4G信号冲突,默认为radio://0/0/250k。
双击连接后,可观察console信息,包含传感器自检信息,如果是6传感器的,HMC5883和MS5611会提示fail。
连上后,主界面会显示电池电量和信号质量,倾斜crazyflie,相应的飞行姿态会在窗口中展现出来。 via http://www.blogjava.net/baicker | 







 有了这些物件库存更简洁方便!
有了这些物件库存更简洁方便! 汽车元件对其它工业又多重要?
汽车元件对其它工业又多重要? 你可知道伺服马达今年150岁啦!
你可知道伺服马达今年150岁啦! LED灯丝灯如何选择驱动电源?
LED灯丝灯如何选择驱动电源?




 发表于 2015-7-28 12:13 PM
发表于 2015-7-28 12:13 PM

 收藏
收藏 分享
分享